
Regard3DはCOLMAPやMetashapeと比べてもユーザーの評判が良い無料の3Dモデリングソフトです。評判が良い理由と写真測量ソフトとしての可能性を探ってみました。
Regard3DはフリーでオープンソースのSfMソフトウェアです。
入手先とインストール
Regared3Dは次のサイトのトップメニューでDownload選び、リンクをクリックします。するとsourceforgeに飛ばされて自動的にインストーラーがダウンロードされますが、画面には他にもいろいろ表示されているのであわてて関係ないものまでダウンロードしないように注意した方が良いかもしれません。SKラボはRegard3D_1.0.0_Setup.exeをダウンロードしました。2019年からアップデートされていないようです。
もう一つ、sensor_database.csvをGitHubから別途入手する必要があります。いろいろなカメラのセンサーサイズデーターベースで、本体とは別にアップデートされているようです。このファイルは、本体のインストール後、”c:\Program Files\Regard3D”フォルダに入れておきます。
なお、インストールすると、Windows10 PCには普通にインストールされ、スタートメニューにも現れましたが、Windows11 PCでは何かトラブルがあり、スタートメニューには登録されませんでした。再現性のある問題かどうかわかりませんが、スタートメニューで見つからない時は、”c:\Program Files\Regard3D\Rigard3D.exe”をダブルクリックすることで起動します。ショートカットをデスクトップなどに置いておくと良いでしょう。
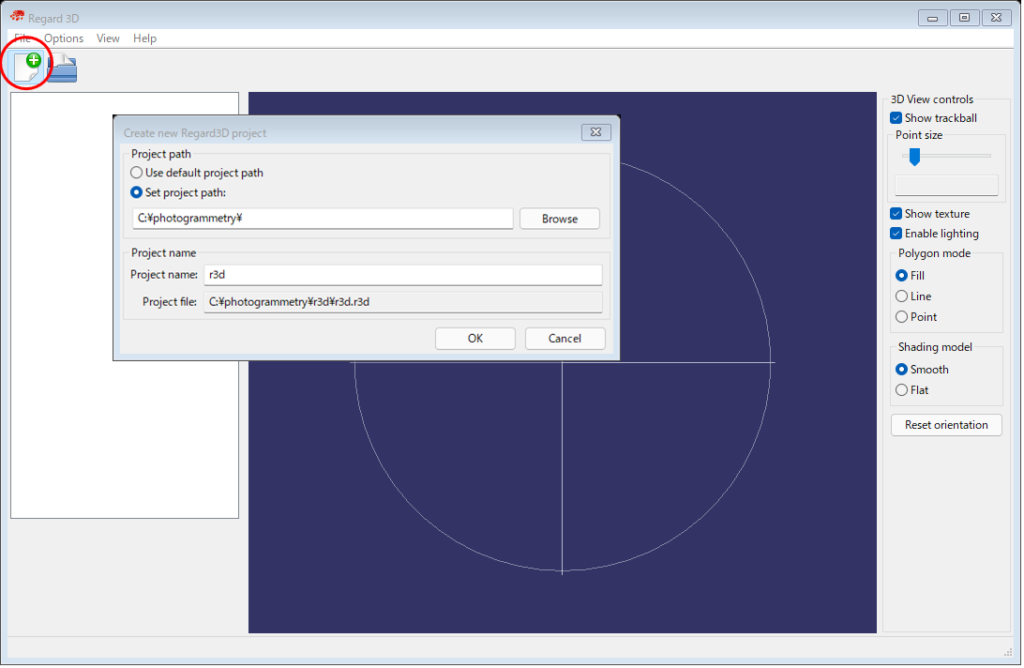
プロジェクトを作り、写真を読み込む
起動するとまず、作業フォルダ内にプロジェクトを作ります。
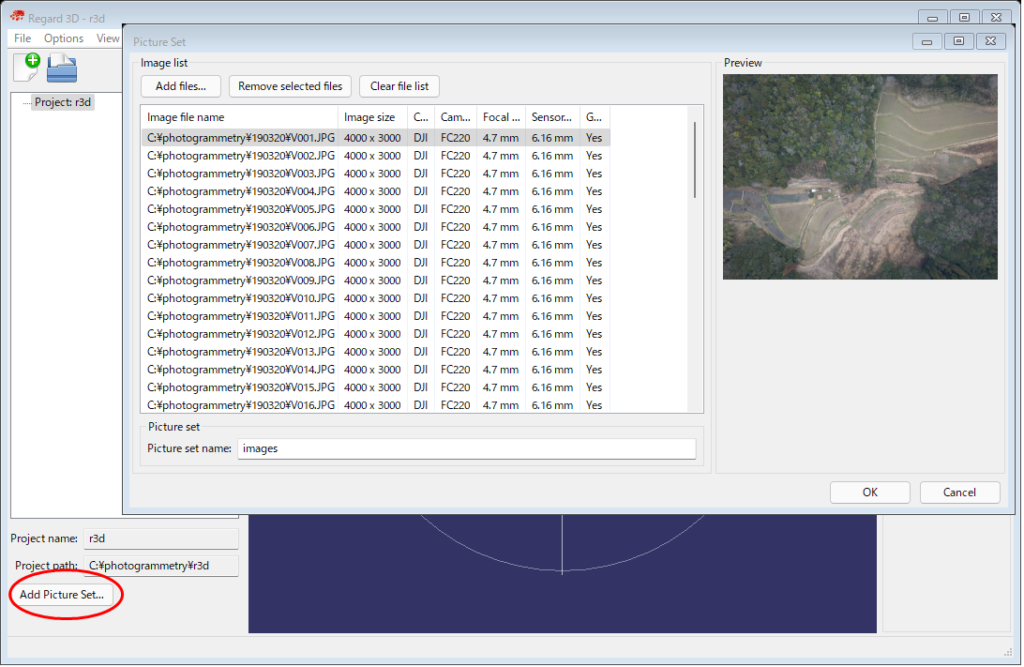
すると、左下に「Add Picture Set…」ボタンが現れるのでクリック。現れたPicture setダイアログで「Add files…」ボタンを押して、写真を読み込みます。ちなみに使用した写真はCOLMAPを試した時と同じ58枚ですが、読み込もうとするとカメラがないと怒られました。Mavic proのFC220カメラはデーターベースに登録されていませんでした。ネットでFC220の諸元を調べ、メニューのOptions-Edit User Camera DB…から登録します。
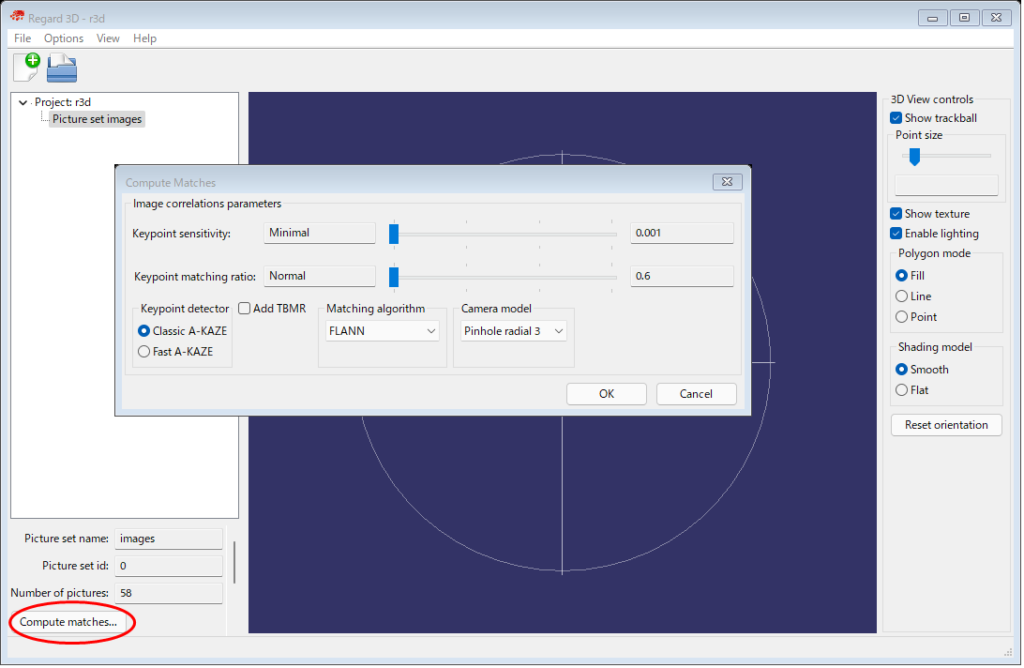
写真の間に対応する点を見つける
写真を読み込むと、「Compute matches…」ボタンが左下に現れるので、クリックし、パラメータを設定します。マニュアルに、大きい画像はsensitivityを小さい値から始めよとあるので、それだけ最低にし、あとはデフォルトでOKします。(ちなみに、手法としてClassic A-KAZEとFast A-KAZEが選択でき、Fast…の方が若干不正確だが速い、というような説明がマニュアルにありますが、今回のデータではむしろClassicの方が速かったです。)
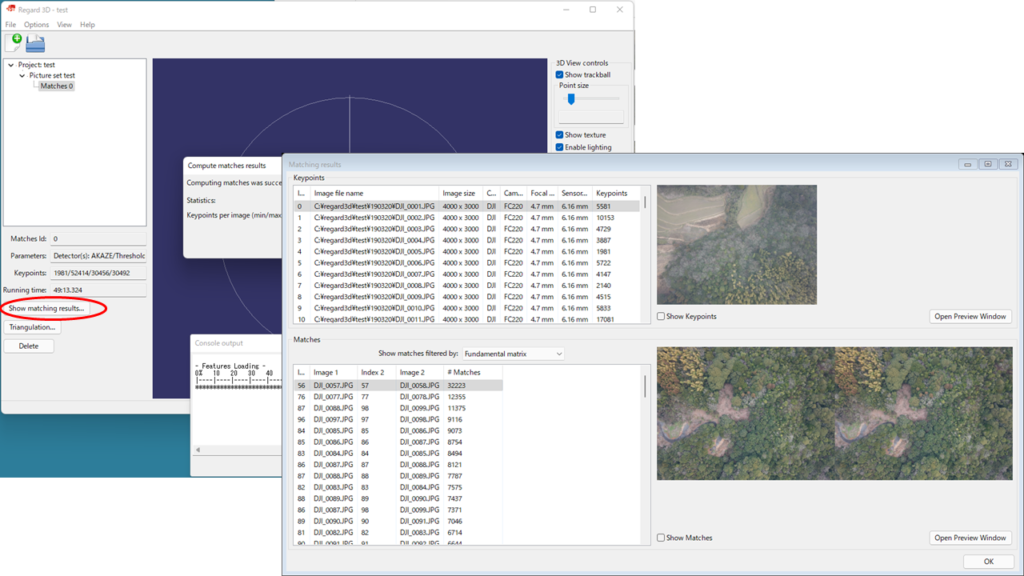
このステップは20分ほどかかりますが、プログレスバーは表示されるものの Console outputには何も表示されず、また実行が終わっても3D表示画面には何も現れないため、うまくいったのかどうか不安になりました。ウインドウ左下に現れる「Show matching results…」をクリックすると、ちゃんと対応点が見つかっていることがわかります。
疎な点群を生成する
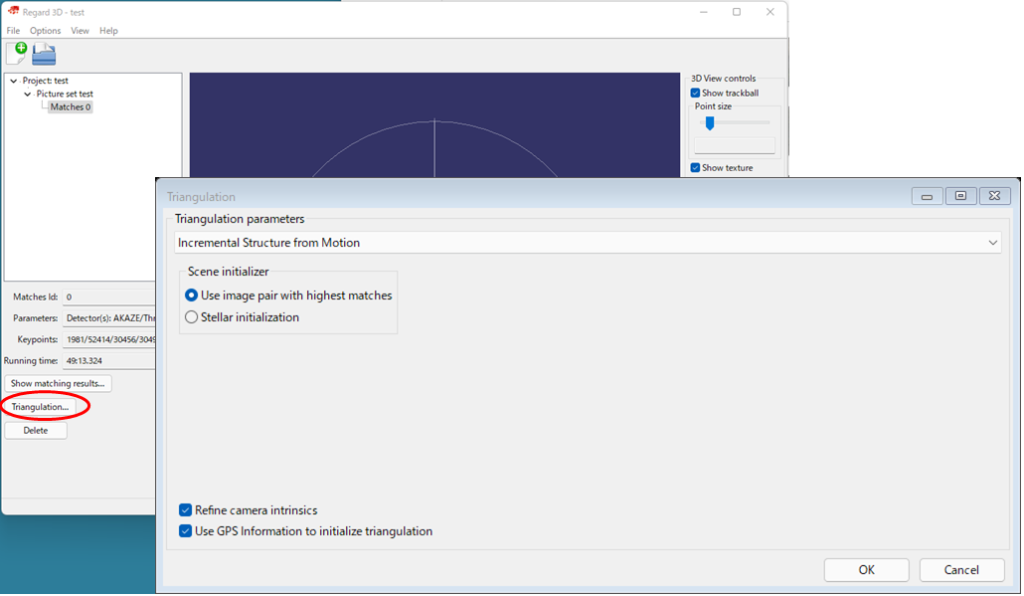
次に、左下の「Triangulation…」ボタンを押し、現れたダイアログはデフォルトのままでOKします。
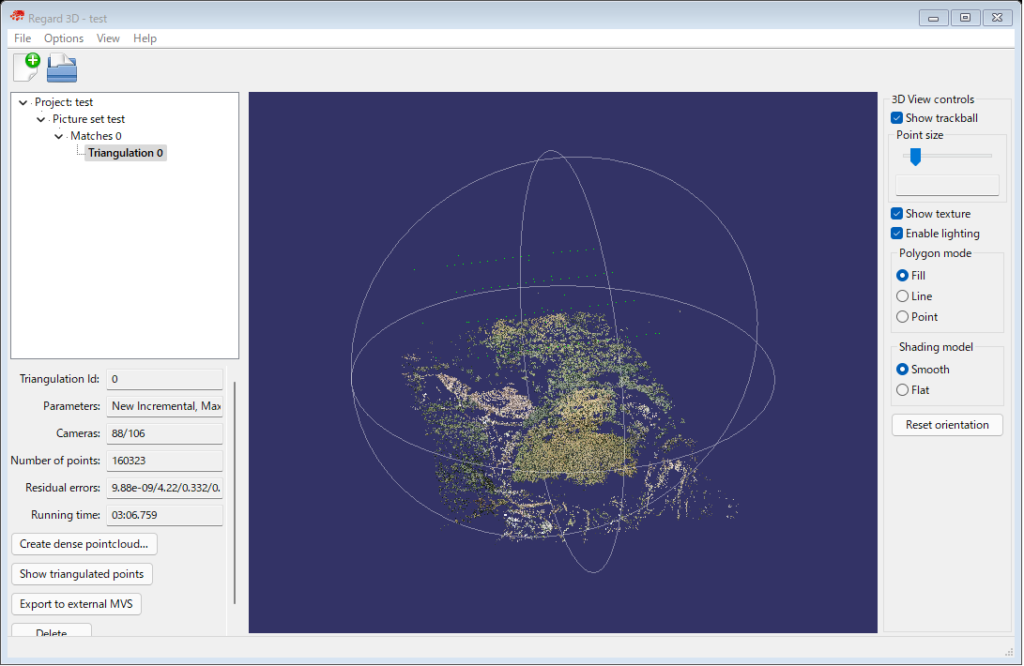
すると3分ほど待たされて疎な点群が現れます。MetashapeやCOLMAPでは、対応点の探索と疎な点群の生成は一つのSfMプロセスですが、Regard3Dでは別々に行うようです。
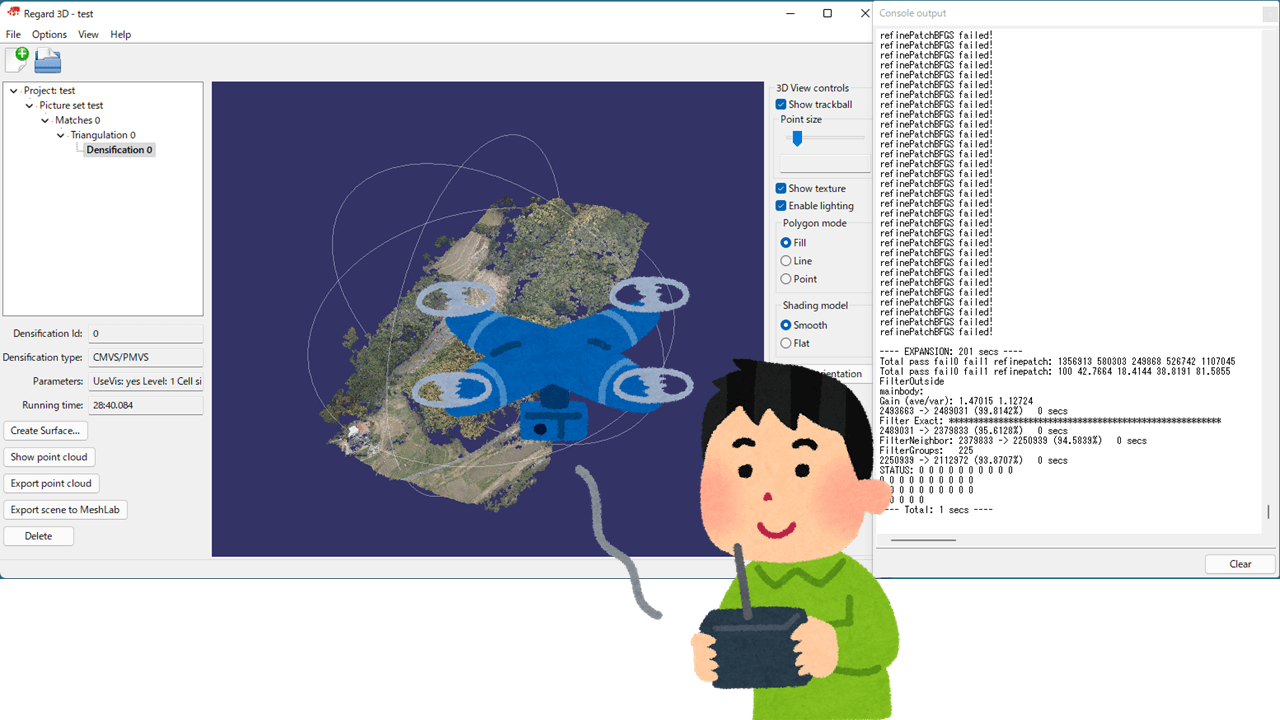
密な点群を生成する
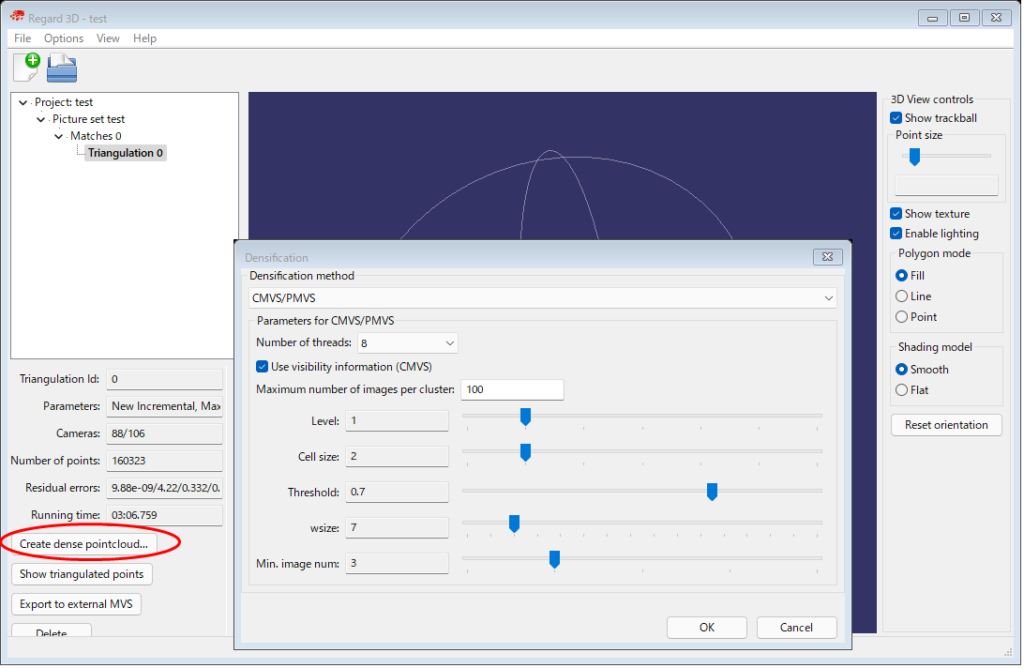
左下の「Create dense piontcloud…」をクリックし、パラメータはデフォルトのままOKします。
25分ほど待たされて、密な点群ができあがります。いわゆるMVSのステップですね。
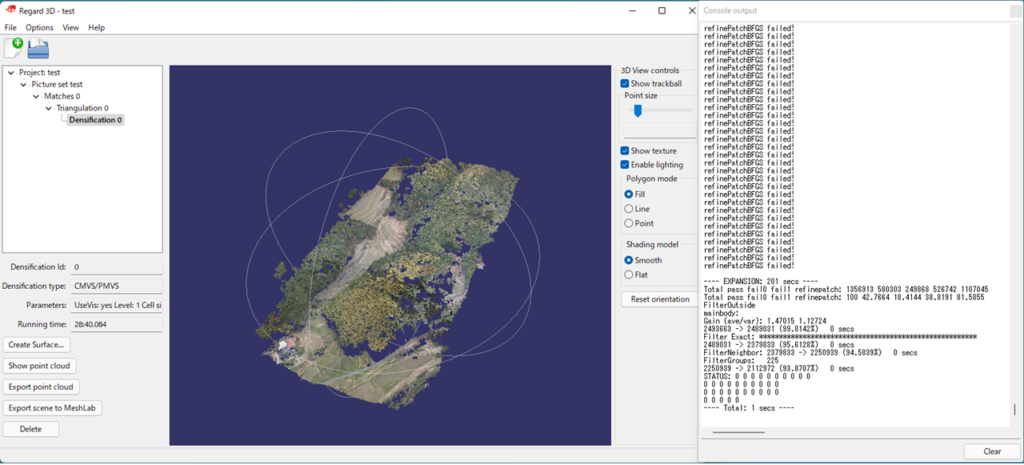
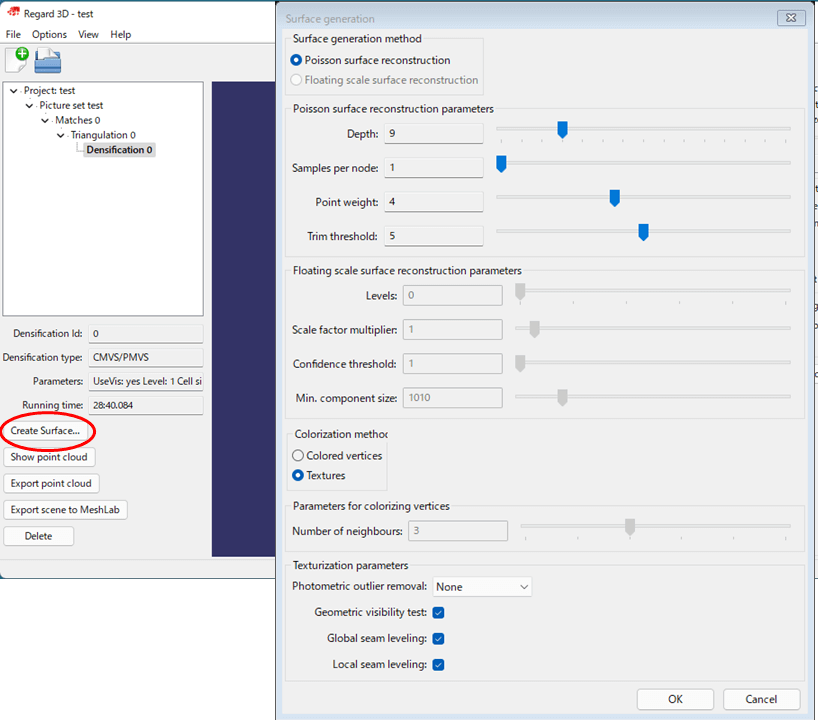
メッシュを生成する
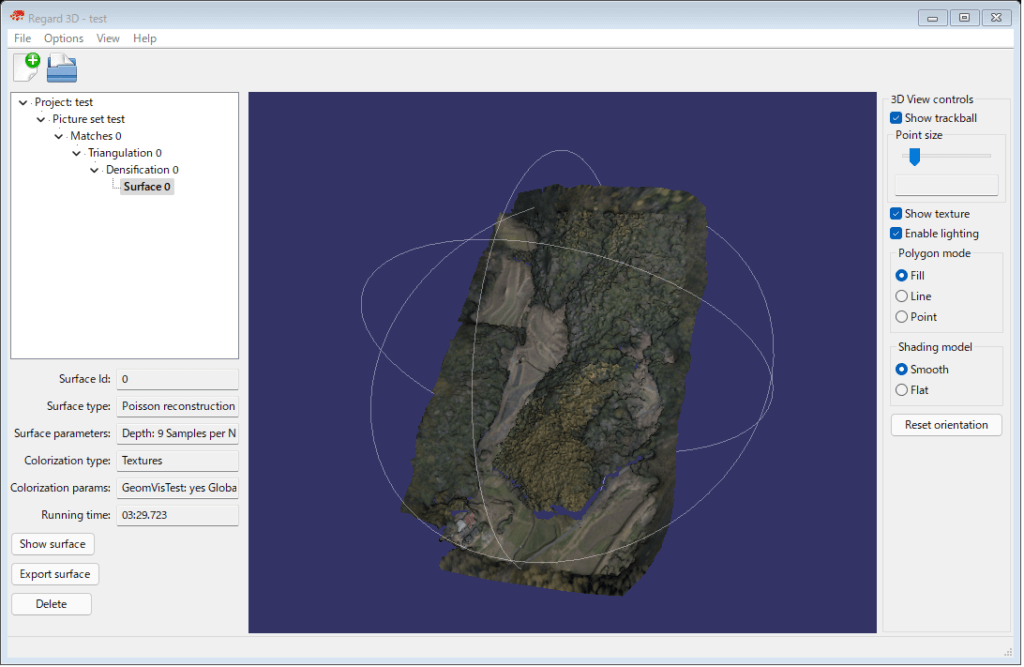
左下の「Create Surface…」をクリックし、パラメータはデフォルトのままOKします。
1分少々でメッシュサーフェスができあがります。
Regard3Dの人気の秘密は・・・
実際に動かしてみて、Regard3Dの人気の秘密は、次にどうすれば良いかが常に画面に表示されていて、迷いなく次のステップに進めるところにあるのではないかと思いました。
また動作速度も最初は遅く感じましたが、COLMAPの2時間待ちを経験すると、GPUも使わないのに意外と速いな、という印象に変わりました。ただし、1ステップ1ステップ操作しないといけないので、COLMAPのように「寝て待てばよい」というわけにはいきません。写真の枚数が多い場合はちょっと辛いかもしれませんね。写真測量のためにはジオリファレンスを別途考えないといけないのもCOLMAPと同じです。
トータルで考えると、Regard3Dは、写真測量よりは小物の3Dモデリングに向いているのではないかなと思います。 Have fun!

コメント