
RTKPOSTにたくさんある測位モードについて、特徴やどう使えば良いのかをいちばん簡単な例で説明します。なお、SKラボはRTKLIBマニュアル著者のT. Takasu氏とは何の関係もありません。RTKLIBの1ユーザーとして勉強した結果をまとめたものです。本文に誤りが含まれていればすべてSKラボの責任です。
GNSSによる測位の考え方
GNSSは、位置が既知の複数の衛星との距離を計測することで自身の座標を求めます。距離の計測法の違いで標準測位と、後に開発された高精度測位があります。
1台のGNSSが標準測位で計測する自身の座標は、大気の状態や衛星の配置などいろいろな誤差要因が積み重なってエポック(1回の測位)毎に大きく変動します。しかし、大気の状態や衛星の配置などが似通った数km以内の位置にある2台のGNSSどうしには同程度の誤差が生じていますので、2台のGNSSの相対的な位置関係は比較的精度よく求めることができます。このとき、高精度測位と組み合わせるとより精度が高くなります。また、1台のGNSSの絶対座標が既知であれば、もう1台のGNSSの絶対座標を求めることができます。座標を測定したい場所に置くGNSSを移動局(Rover)、絶対座標が既知の場所に置くGNSSを基地局(Base)と呼びます。
RTKPOSTにおける測位モードの概要
測位モードの概要を表にしました。表中に記載の精度は、RTKLIB開発者のセミナー資料から引用しています。測位モード名をクリックすると、直接使用例にジャンプします。
| 測位モード | 必要GNSS数 | 特徴 |
| Single | 1 | 1台のGNSSで標準測位する基本的なモード。精度は水平3m、鉛直5m程度。 |
| DGPS/DGNSS | 2 | 基準局・移動局の2台を用い、標準測位で相対的な位置関係を決定。精度は水平1m、鉛直2m程度。 |
| Kinematic | 2 | 基準局・移動局の2台を用い、高精度測位で相対的な位置関係を決定。エポック毎に新たに移動局座標を求めるため、移動局の移動する軌跡を追跡することが可能。精度は水平1cm、鉛直2cm程度。 |
| Static | 2 | 基準局・移動局の2台を用い、高精度測位で相対的な位置関係を決定。エポック毎に移動局座標が変化しない式を用いるため移動局は動かせないが、エポックを重ねるごとに精度が向上。精度は水平0.5cm、鉛直1cm程度。 |
| PPP-Kinematic | 1 | 1台のGNSSのみを用い、高精度測位以上の高度な補正を施すことで精度向上を目指す。GNSSの軌跡を追跡することが可能。 |
| PPP-Static | 1 | 1台のGNSSのみを用い、高精度測位以上の高度な補正を施すことで精度向上を目指す。GNSSは動かせない。 |
| Moving-Base | 2 | 移動物体上に2台のGNSSを設置することで、移動物体の進行方向や傾きを計測する。測量目的ではないため本稿では説明しない。 |
| Fixed | 残差解析のためのモードで本稿では説明しない。 | |
| PPP-Fixed | 残差解析のためのモードで本稿では説明しない。 |
RTK測量とかRTK-GPSとかよく聞くけど、RTKPOSTにはRTKモードは無いの?
RTKはReal Time Kinematicの略で、基準局と移動局の間で衛星との距離情報をデータ通信することでリアルタイムにKinematicモードで測位するんだ。測定したその場所で結果を見ることができるよ。RTKPOSTはPOST(after)の名の通り、一旦データを取って事後処理で計算するプログラムだよ。RTKLIBでRTK測量するならRTKNAVIプログラムを使ってね。
実行例で使用したデータ
SKラボが長年使用してきた古い測量用GPSを建物屋上に設置し、2022年8月9日13:57:12から16:02:42 (JST)まで静止した状態で15秒ごと(4Hz)に衛星との距離を記録したRINEXファイル (gps2.22o, gps2.22n)を移動局(Rover)データとしました。
また、移動局から約2.5kmの位置にある電子基準点の同日のRINEXファイル(ube.22o, ube.22n)を基準局(Base)データとしました。Baseデータは2Hzです。
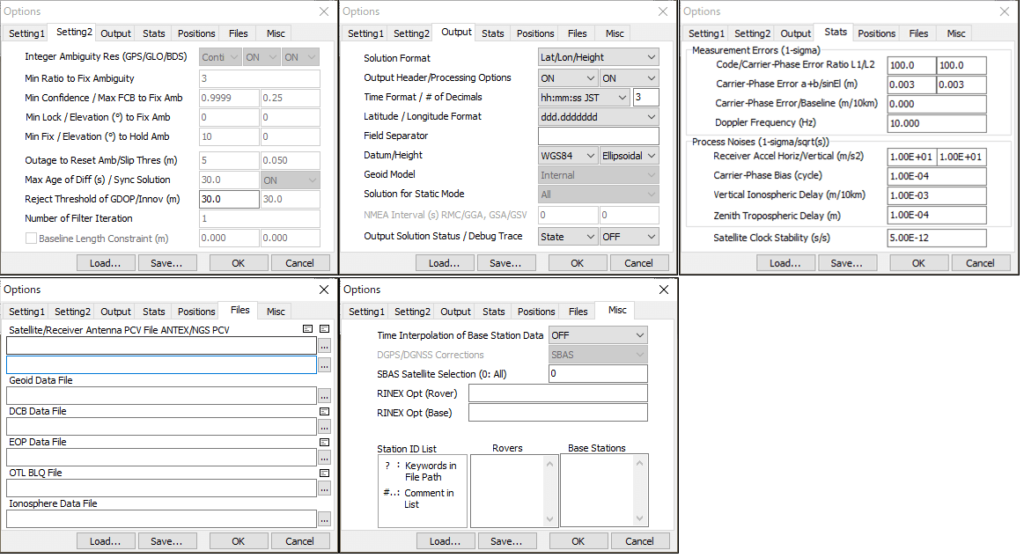
実行例共通のオプション
各モードの計算で変更していないオプション設定を下図に示します。精度のよい解析をする上では設定した方が良いオプションもありますが、最も単純な設定で各モードの挙動の違いを見るために、あえて設定していません。
実行例:Singleモード
1台のGNSSを使って標準測位する最も単純な方法です。
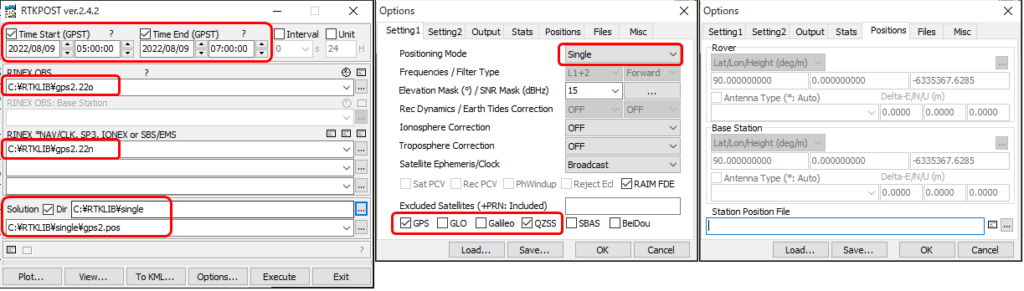
下図は使用したパラメータです。
左端のメインウインドウでは、解析時間、RINEX観測ファイル、RINEX航法ファイル、出力ファイルを設定しています。Time StartとTime Endは移動局データを取得した時間の中から切りのよいJST14時から16時をGPSTに換算(約-9時間)して設定しました。
中央のSetting1オプションでは、赤枠に示すようにPositioning ModeでSingleを選び、使用する衛星としてGPSとQZSSにチェックを入れています。実際には今回使用した移動局はQZSSに対応していないので、GPSだけでも良かったです。赤枠をつけていない部分でも、設定可能な各種補正はできるだけOFFにし、無効な測定値を除外するRAIM FDEのみチェックしています。
右端のPositionsオプションには何も入れていません。
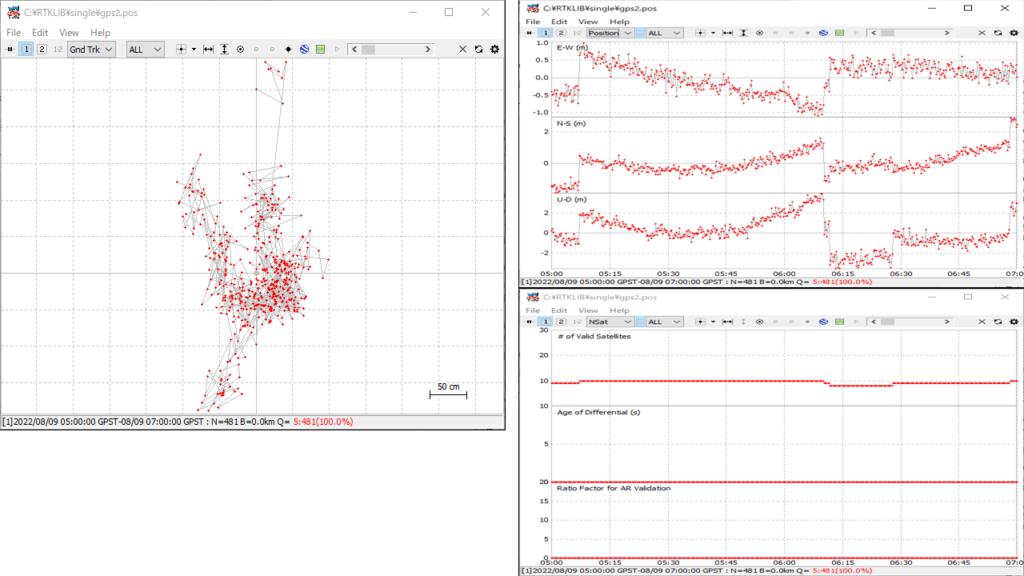
解析結果をエポック毎にプロットすると下図のようになります。下図左・右上より、南北方向に5m、東西方向に2m、鉛直方向に8m程度の範囲で動き回っていることが見て取れます。また下図右より、受信衛星数が変化するタイミングで測位値が大きく変化していることがわかります。
実行例:DGPS/DGNSSモード
基地局・移動局の2台を用い、標準測位で相対的な位置関係を決定する方法です。
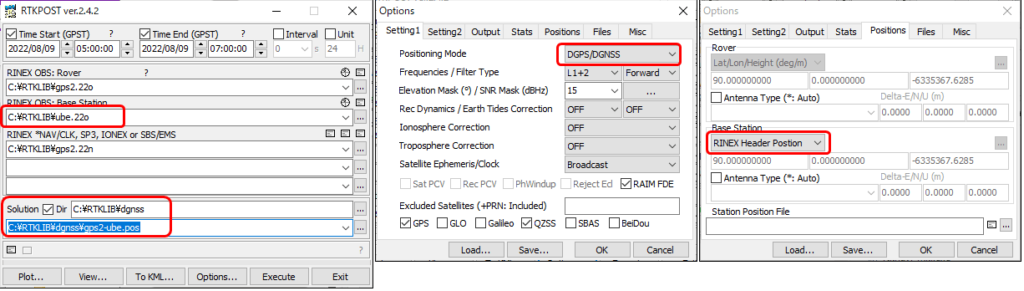
下図は使用したパラメータです。Singleモードから変更した部分に赤枠をつけてあります。
下図左のメインウィンドウでは、基準局の観測ファイル(.22o)を設定しています。その下にある航法ファイル(.22n)は移動局のものを設定してありますが、基準局のものを設定しても構いません。共通した衛星のデータだけが使用されるからです。また、航法ファイルを設定せず空白のままにしても構いません。マニュアルに記載されているように、観測ファイルと同じフォルダにある航法ファイルが自動的に利用されます。
中央のSetting1オプションでは、赤枠でDGPS/DGNSSを選択しています。
右端のPositionsオプションでは、赤枠部分で基準局の座標をRINEXのヘッダーから取得するよう設定しています。実際の測量では、Lat/Lon/Height (deg/m)等を選択して、公表されている電子基準点の座標値を手入力した方が良いでしょう。
解析結果をエポック毎にプロットすると下図のようになります。下図右より、測定値は南北方向に1.4m、東西方向に0.9m、鉛直方向に2m程度の範囲で動き回っており、Singleモードよりばらつきが小さいことがわかります。また衛星数の変化に敏感に結果が動くということもありません。
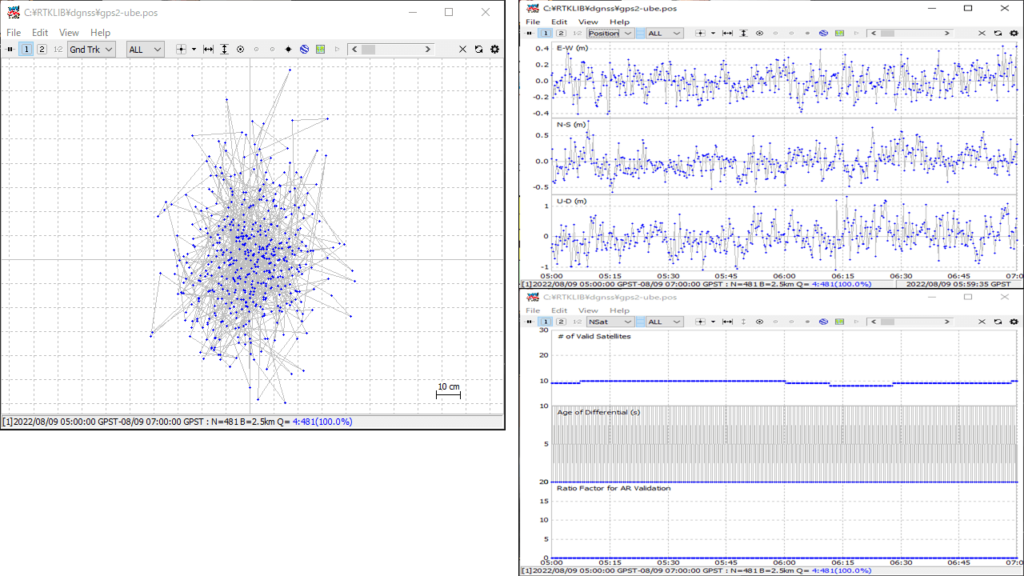
なお、上図右下の中段、Age of Differentialが振動しています。Age of Differentialは基準局と移動局のエポックの測定時間の差で、今回のデータでは基準局が2Hz、移動局が4Hzで測位しているため、必然的に移動局の1エポックおきに最大15秒の差が生じます。この差があまり大きいと誤差が大きくなります。RTKPOSTではSetting2オプションで許容できる最大値を設定でき、デフォルト値は30秒になっています。
実行例:Kinematicモード
基準局・移動局の2台を用い、高精度測位で相対的な位置関係を決定する方法です。エポック毎に新たに移動局座標を求めるため、移動局の移動する軌跡を追跡することが可能ですが、本解析では移動局も固定されているためにその強みは生かされていません。
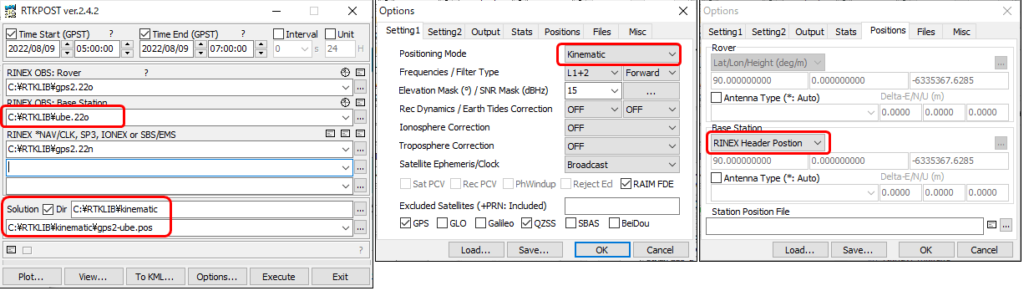
下図は使用したパラメータです。Singleモードから変更した部分に赤枠をつけてあります。
下図中央のSetting1でPositioning ModeがKinematicにしてある他はDGPS/DGNSSモードと同じですので説明は省きます。
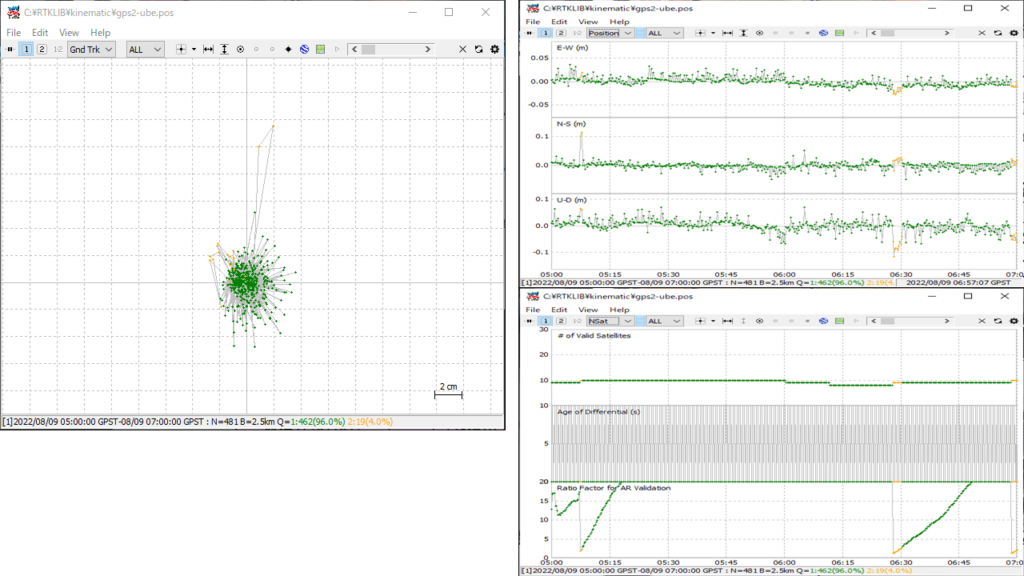
解析結果をエポック毎にプロットすると下図のようになります。緑色のプロットがfix解で全エポックの96%、黄色のプロットがfloat解で全エポックの4%になっています。fixとfloatの閾値は右下図のRatio Factor for AR Validation(高精度距離計測に対する信頼性みたいなもの)が3を下回るかどうかです。計測開始時と衛星数が増加する時に信頼性が低下することがわかります。
fix解は南北方向10cm、東西方向6cm、鉛直方向20cm程度に収まっており、DGPS/DGNSSモードに比べて格段に高精度です。
なお、下図右下中段のAge of Differentialの振動についてはDGPS/DGNSSモードで説明したので省きます。
さらに、下図のようにfix解の10項移動平均をとるとほとんどが水平方向3cm、鉛直方向6cm程度の変動に収まりいっそう高精度になります。RTK測量では、60Hz程度で測位を行う基準局・移動局を使って10エポック分のfix解から座標を確定して、すぐに次の地点に移動して測定を続けていきますが、それでも高精度なのはこのためなんですね。
実行例:Staticモード
基準局・移動局の2台を用い、高精度測位で相対的な位置関係を決定する方法です。エポック毎に移動局座標が変化しない式を用いるため移動局は測定中に動かせませんが、エポックを重ねるごとに測位精度が向上します。
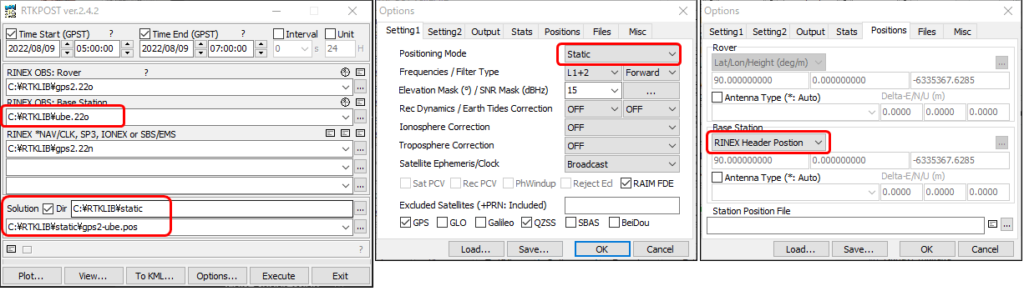
下図は使用したパラメータです。Singleモードから変更した部分に赤枠をつけてあります。
下図中央のSetting1でPositioning ModeがStaticにしてある他はDGPS/DGNSSモードと同じですので説明は省きます。
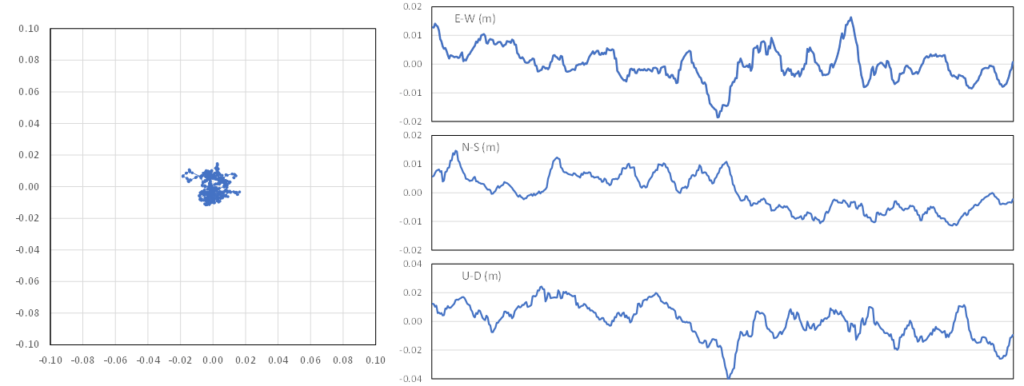
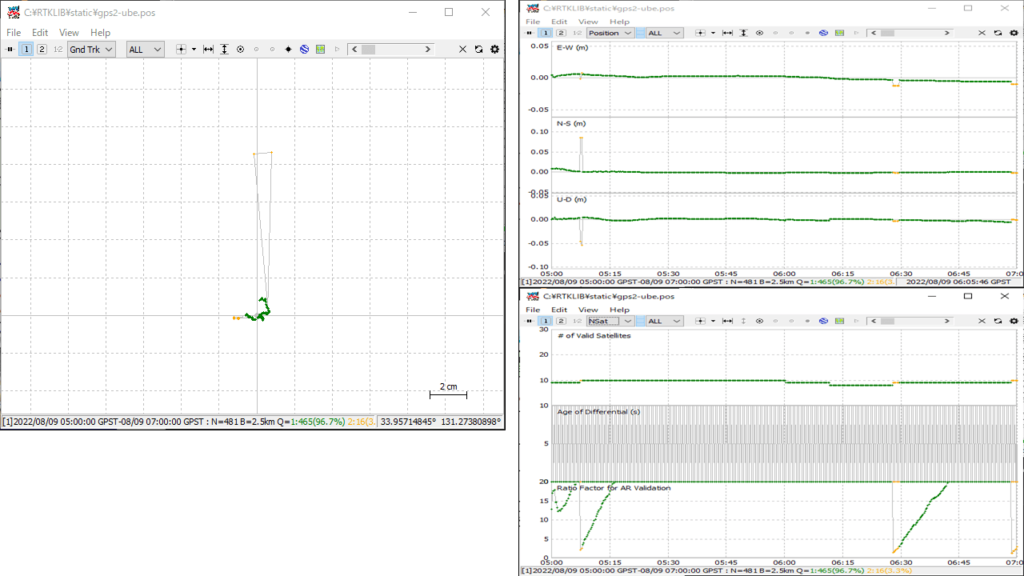
解析結果をエポック毎にプロットすると下図のようになります。緑色のプロットがfix解で全エポックの96.7%、黄色のプロットがfloat解で全エポックの3.3%になっています。fixとfloatの閾値はKinematicモードの項で説明したので省きます。
fix解は水平方向、鉛直方向とも2cm以下の変動に収まっており、Kinematicモードと違ってエポック毎のばらつきも小さいです。
なお、下図右下中段のAge of Differentialの振動についてはDGPS/DGNSSモードで説明したので省きます。
測量業務では基準局として国土地理院の電子基準点を使用し、1か所2時間ほどかけてcm以下の精度で基準点測量を行いますが、1か所5分から10分かけることができればcm以下とはいかなくともKinematicモードより高精度の測量ができます。その際、測位値としては全fix解の平均値ではなく、最後のfix解を用いれば良いでしょう。
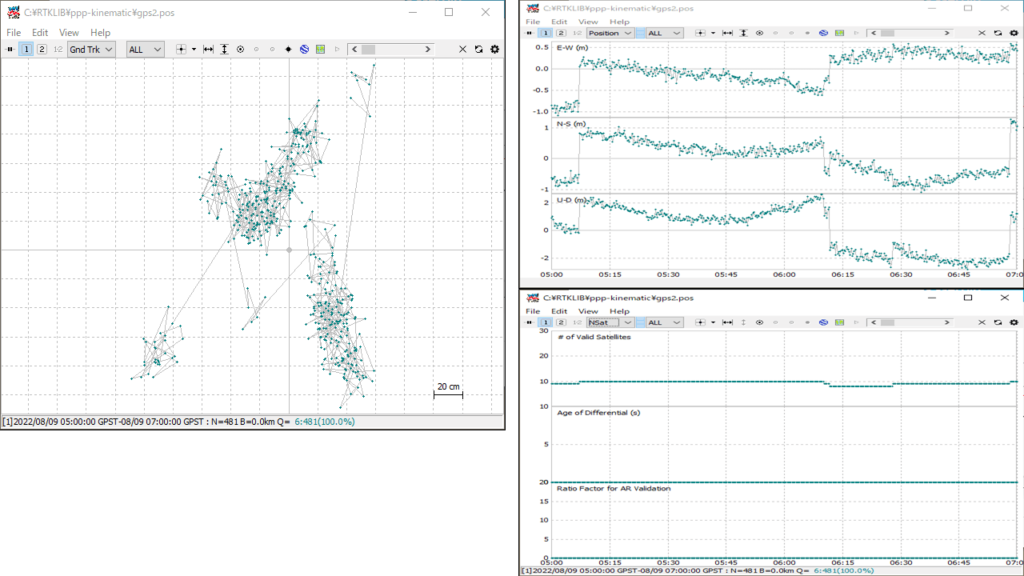
実行例:PPP-kinematicモード
1台のGNSSのみを用い、高精度測位以上の高度な補正を施すことで精度向上を目指す方法です。移動局の軌跡を追跡することができます。本事例ではまずは本モードでプログラムを動かすことを重視し、一切補正情報を使用せずに解析しています。
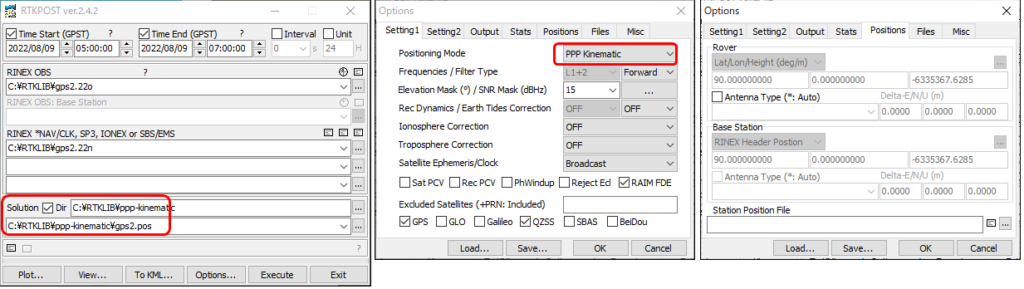
下図は使用したパラメータです。Singleモードから変更した部分に赤枠をつけてあります。
解析結果をエポック毎にプロットすると下図のようになります。Singleモードよりわずかに変動範囲は小さいようですが、補正情報を使用していないので、実力を発揮できていません。
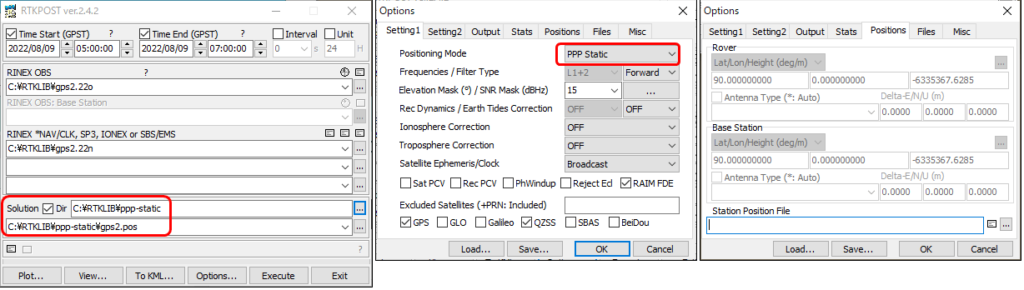
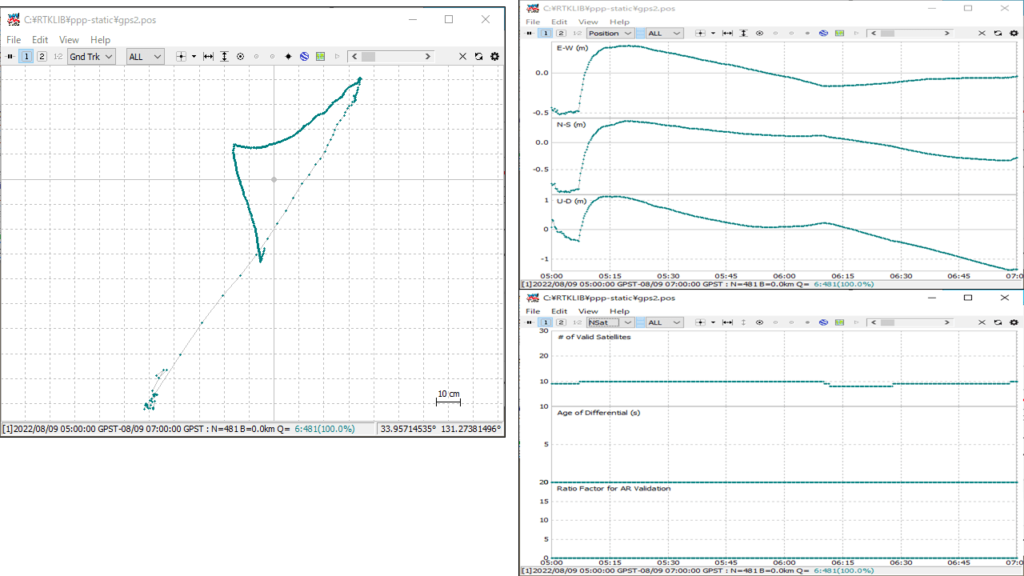
実行例:PPP-Staticモード
1台のGNSSのみを用い、高精度測位以上の高度な補正を施すことで精度向上を目指す方法です。移動局は固定です。本事例ではまずは本モードでプログラムを動かすことを重視し、一切補正情報を使用せずに解析しています。
下図は使用したパラメータです。Singleモードから変更した部分に赤枠をつけてあります。
解析結果をエポック毎にプロットすると下図のようになります。PPP-Kinematicモードより変動範囲は小さいようですが、補正情報を使用していないので、実力を発揮できていません。
各モードの比較
座標の平均値と誤差、標準偏差
下表は、測位された15秒ごと481エポックの座標を平面直角座標に換算した上で、平均値、Staticモードの平均値を正解と見なした時の誤差、座標値の標準偏差を示しています。float解は除去していません。
StaticとKinematicnの平均値は数mmの違いですが、Staticの標準偏差は数mm、Kinematicの標準偏差はStaticの数倍あります。
DGNSSとStaticは平均値では数cmの違いですが、DGNSSの標準偏差は数十センチあります。
Singleの平均値はStaticに比べて水平方向に数十センチ、鉛直方向に10m以上の違いがあります。
PPP-KinematicはSingleよりわずかに良い程度、PPP-Staticはそれより少し標準偏差が小さい程度ですが、PPPの特徴である補正法を適用していないので実力が発揮できていません。

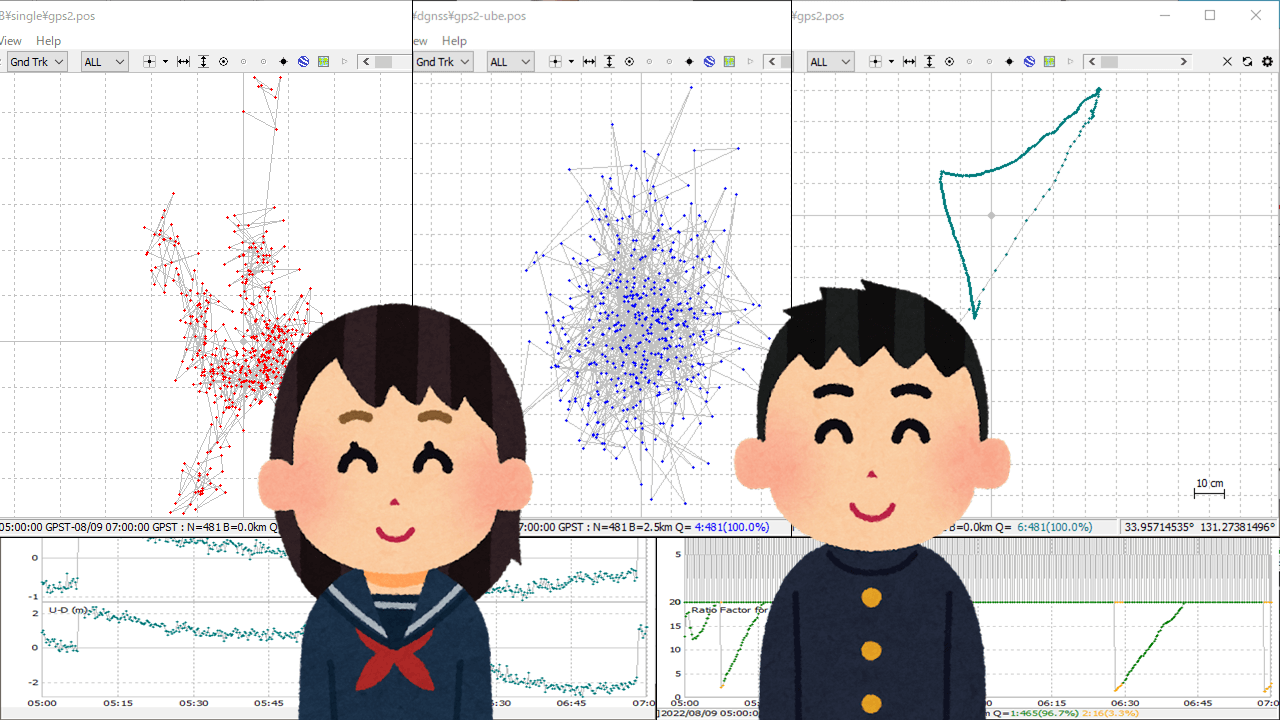
平面座標のプロット
下図は、各モードで得られたエポック毎座標を平面上にプロットしたものです。
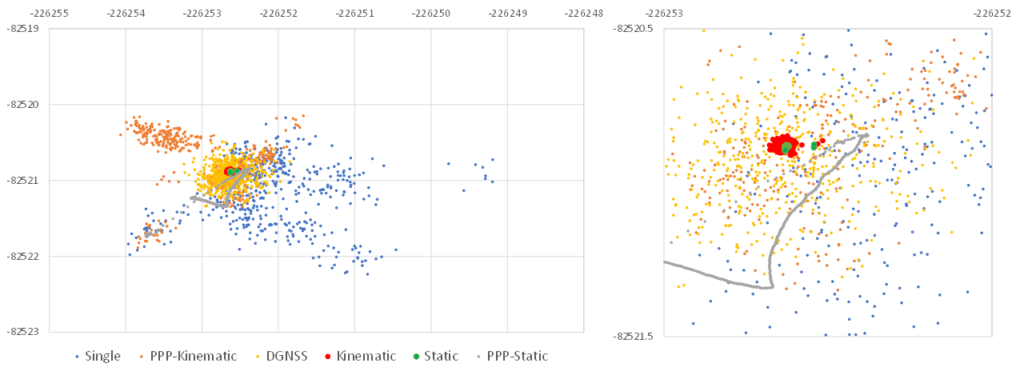
Singleや補正情報を使用していないPPP-Kinematicは広く分布しています。一方float解を含んだ状態でもKinematic、Staticは格段に高い精度を示しています。DGNSSは重心はKinematic, Staticに近く、ばらつきもSingleより明確に小さいです。PPP-staticは一時的にStaticの解に近付いていく挙動を見せており、補正情報を使用した時の改善が楽しみですね。Have fun!
コメント