
RTKLIB Ver.2.4.2の英語マニュアルから、GUIでGNSSデータの事後解析を行うRTKPOSTについてユーザーの立場で日本語化しました。機械翻訳をベースとし、初心者向けに修正・削除・追記してあります。なお、SKラボはマニュアル著者のT. Takasu氏とは何の関係もありません。本文に誤りが含まれていればすべてSKラボの責任です。文中に英語マニュアルのページを付記してありますので、疑問があれば原典を参照ください。
- RTKPOSTとは (p.29)
- RTKPOSTの使い方 (p.29)
- オプションの構成 (p.34)
- Setting 1 オプション (p.34)
- Setting 2 オプション (p.38)
- Integer Ambiguity Resolution (GPS)
- Integer Ambiguity Resolution (GLO)
- Min Ratio to Fix Ambiguity
- Min Confidence to Fix Amb.
- Max FCB to Fix Amb.
- Min Lock / Elevation to Fix Ambiguity
- Min Fix / Elevation to Hold Ambiguity
- Outage to Reset Ambiguity / Slip Thres
- Max Age of Differential
- Sync Solution
- Reject Threshold of GDOP / Innov.
- Number of Iteration
- Baseline Length Constant
- Output オプション (p.40)
- Statistics オプション (p.42)
- Positions オプション (p.43)
- Files オプション (p.45)
- Misk オプション (p.48)
RTKPOSTとは (p.29)
RTKPOST は、標準の RINEX 2.10、2.11、2.12、3.00、3.01、3.02 (ドラフト) の観測データとナビゲーション メッセージ ファイル (GPS、GLONASS、Galileo、QZSS、BeiDou、SBAS) を入力し、Single‐point、DGPS/DGNSS、Kinematic、Static、PPP-Kinematic、 PPP-Staticなどのさまざまな測位モードで測位解を計算できます。
RTKPOSTの使い方 (p.29)
(1) <install dir>\rtklib_<ver>\bin\rtkpost.exe をダブルクリックすると、RTKPOST のメインウィンドウが表示されます。 代わりにrtkpost_mkl.exe を実行できます。これは、インテルMKL ライブラリーをリンクしたバージョンで、高速な行列計算を行います。
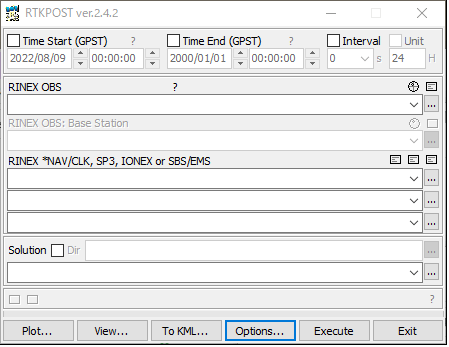
(2) 「RINEX OBS(: Rover)」フィールドにローバー受信機のRINEX観測データファイルパスを入力します。 […] ボタンをクリックし、ファイル選択ダイアログで選択することもできます。 RINEX観測データは、GZIP (.gz)、COMPRESS (.z)、Hatanaka-Compression (.yyd) による圧縮ファイルを利用することができます。 圧縮ファイルかどうかは、ファイル拡張子で認識されます。 ファイルパスにワイルドカード(*)が含まれている場合、ワイルドカードを展開して複数のファイルを読み込みます。
(3) DGPS/DGNSS、Kinematic、Static、Moving-Base、Fixed などの相対測位モードで RINEX データを処理する場合は、ローバー観測データファイルに加えて「RINEX OBS: Base Station」フィールドに基地局のRINEX観測データファイルパスを入力する必要があります。
- (a) .sp3,.SP3,.eph,.EPH : SP3-c 精密天体暦ファイル
- (b) .sbs、.SBS、.ems、.EMS : SBAS メッセージ ログ ファイル
- (c) .rtcm3,.RTCM3 : RTCM 3 SSR補正メッセージファイル
- (d) .*i,.*I : IONEX VTECグリッドデータファイル
- (e) その他 : RINEX OBS、NAV または CLK (自動認識)
(5) 「Solution」フィールドに出力ファイルのパスを入力します。 このフィールドは、観測データファイルの拡張子が .pos または .nmea に置き換えられたものに自動的に設定されます。「Dir」にチェックを入れると、出力ディレクトリを指定できます。
(6) Options… ボタンを押して、オプションを設定します。 オプションの詳細については、「 オプションの構成」を参照してください。 メインウィンドウの Time Start (GPST) または Time End (GPST) フィールドをチェックして設定することで、解析の開始時刻または終了時刻を設定できます。 また、「Interval」フィールドをチェックして設定することで、時間間隔を設定できます。 ? ボタンを押すと、入力時刻を UTC、GPS 週/TOW、年間通算日、週日、時刻、うるう秒に変換できます。
(7) 「Time Start」と「Time End」の両方をチェックすると、複数セッション分析の「Unit」をチェックできます。 「Unit」がチェックされ、「Unit」時間が[hr]に設定されている場合、分析セッションは単位時間の複数のセッションに分割されます。 以前の出力ファイルを上書きしないようにするには、出力ファイルパスに、セッション時間に応じて置換されるキーワードを含める必要があります。 入力または出力ファイルパスのキーワード置換の詳細については、「Miscオプション – Station ID List」を参照してください。
(8) Executeボタンを押して解析を開始します。 メインウィンドウ中央下部のステータスメッセージ欄に処理状況が表示されます。 ここに「done」メッセージが表示されたら、分析は完了です。 途中で処理を止めたい場合は、Abort ボタンを押してください。
(9) 解析終了後、View…ボタンを押すと、出力ファイルの内容を「Text Viewer」で表示できます。 「Text Viewer」ウィンドウの ボタンを押すと、出力ファイルをリロードできます。 ウィンドウを閉じるには、Closeボタンを押します。 Options… ボタンを押すと、「Text Viewer」オプションを設定できます。 検索ボタンを使用して、テキスト内の文字列を検索することもできます
(10) Plot… ボタンを押すと、RTKPLOT で結果をプロットすることもできます。 詳細については、3.7 RTKPLOT を使用した解と観測データの表示とプロットを参照してください。
(11) To KML… ボタンを押すと、「Google Earth コンバータ」ダイアログで出力ファイルを Google Earth KML ファイルに変換できます。 オプションを設定または選択し、ダイアログの [変換] ボタンを押します。 Google Earth ボタンを押すと、生成された KML/KMZ ファイルで Google Earth を起動できます。 Google Earth 実行ファイルを指定するには、「オプション」 ‐ 「ファイル」 ‐ 「Google Earth Exe ファイル」を構成します
(12) メインウィンドウの ボタンで、入力された観測データ RTKPLOT を表示およびプロットできます。 ボタンを押すと、テキストビューアで入力ファイルの内容を表示することもできます。
(13) 処理オプションとしてソリューション統計またはデバッグ トレースを出力する場合は、ウィンドウの左下のボタンを押して、ソリューション統計ファイルまたはデバッグ トレース ファイルを表示します。 不適切な結果の場合の処理エラーまたは警告を確認するには、[オプション] ‐ [出力] ダイアログの [デバッグ トレース] を [レベル 2] (エラーおよび警告をトレース) に設定し、出力されたデバッグ トレース ファイルを参照します。
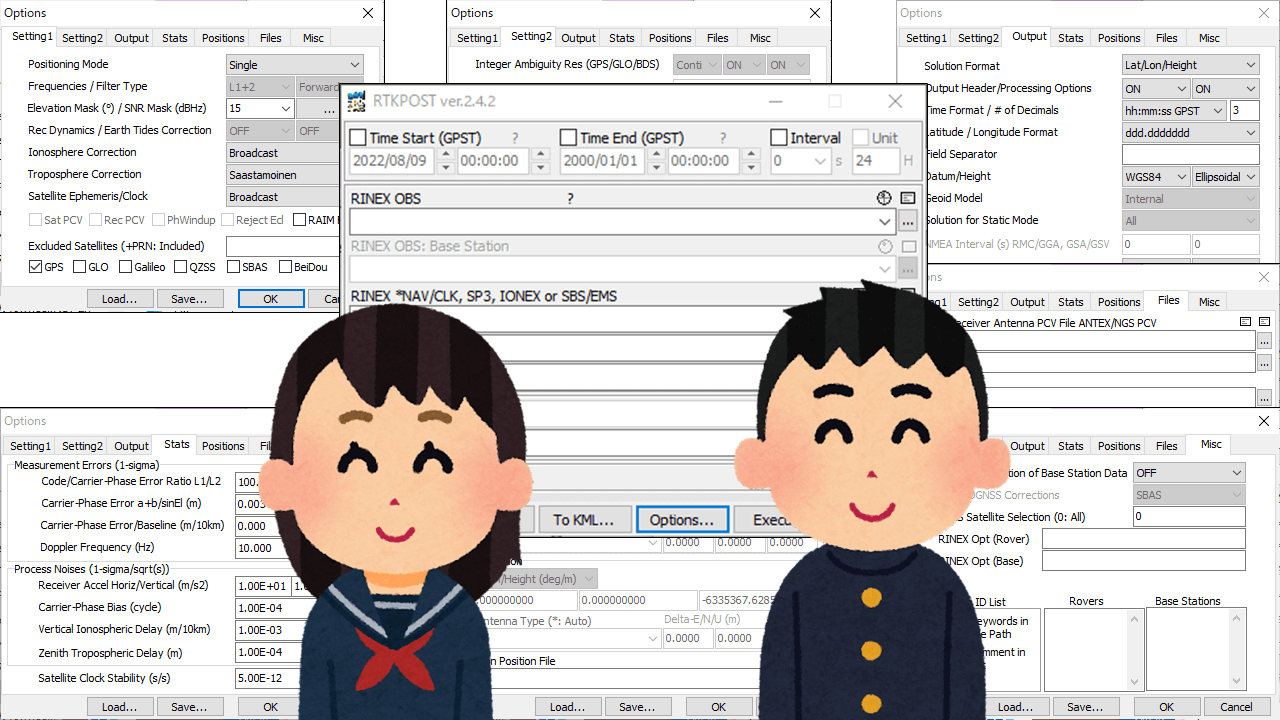
オプションの構成 (p.34)
メイン ウィンドウで Options… ボタンを押すと、オプションを設定できます。 選択または変更可能なオプションは以下で説明しています。 これらのオプションは、ダイアログの [Save…] ボタンを押してファイル パスを選択することにより、構成ファイルに保存できます。 オプションは、[Load…] ボタンを押して構成ファイルを選択することにより、構成ファイルから読み込むことができます。 設定ファイルについては、B.4 を参照してください。 構成ファイルに含めることができるキーワードも、次の表に示されています。 これらのオプションで指定されたモデルの詳細については、付録 E でも説明されています。
Setting 1 オプション (p.34)
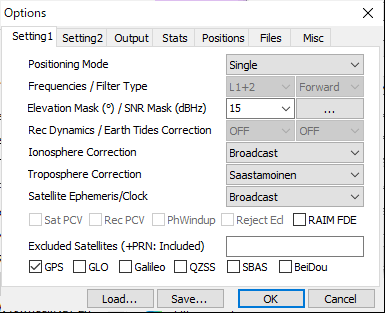
Positioning mode
- Single : 一点測位またはSBAS DGPS
- DGPS/DGNSS : コードベースのディファレンシャル GPS
- Static : キャリアベースの静的測位
- Kinematic:キャリアベースの動的ポジショニング
- Moving-Base:ムービングベースライン
- Fixed:ローバー受信機の位置は固定です*
- PPP Kinematic: キネマティック モードによる正確なポイント ポジショニング
- PPP Static: 静的モードによる正確なポイント測位
- PPP Fixed:PPPモードでローバー受信機の位置を固定 *
*は残差解析のために使用
Frequencies
受信機によって利用できる周波数が異なるため、適切に設定します。
- L1 : L1 単一周波数
- L1+2 : L1 と L2 デュアル周波数
- L1+2+5: L1、L2、L5 トリプル周波数
SingleとPPP-モードでは利用不可
Filter Type
- Forward: フォワード フィルター ソリューション
- Backward: バックワード フィルター ソリューション *
- Combined: 前方および後方フィルター ソリューションとのよりスムーズな組み合わせソリューション *
*はSingleでは利用不可
Elevation Mask
低高度の衛星を使用すると精度が下がるため、高度マスクを角度で設定する。
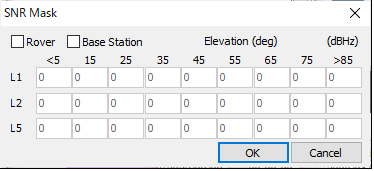
SNR Mask
衛星のS/N比が低いと精度が低下するため、SNR マスクを設定します。 … ボタンを押して「SNR Mask」ダイアログを表示します。 ダイアログで SNR しきい値を設定して、高度5 度ごとにカットする信号レベルを設定します。 「Rover」と「Base Station」の両方がチェックされていない場合、これらの SNR マスクは適用されません
Rec Dynamics
ローバー受信機のダイナミクス モデルを設定します。
- OFF: ダイナミクスを使用しない
- ON: 受信機の速度と加速度を推定します。
受信機の位置は、推定された速度と加速度で予測されます。
DGPS/DGNSSモードとKinematicモードで有効です。
Earth Tides Correction
地球潮汐による地球の変形を補正するかどうか設定します。
- OFF:地球潮汐補正を適用しない
- Solid: 固体地球潮汐補正を適用
- Solid/OTL: 固体地球潮汐、OTL (海洋潮汐荷重)、極潮汐補正を適用 *
OTL 補正を適用するには、[Files] タブの [Ocean Loading BLQ Format] で OTL 係数ファイルパスを設定し、入力 RINEX ファイルにマーカー名を含めて、BLQ ファイルでステーションを選択する必要があります。 極潮汐を適用するには、[ファイル] タブの [EOP データ ファイル] で ERP (地球回転パラメータ) ファイルパスを設定します。
Singleモードでは利用不可です。
Ionosphere Correction
電離層補正オプションを設定します。 パラメータEstimatedを設定した場合。 各衛星の垂直電離圏遅延が推定されます。 長い基線解析では、電離圏推定が電離圏遅延効果を抑えるのに有効です。
- OFF : 電離層補正を適用しない
- Broadcast:放送電離圏モデルを適用
- SBAS: SBAS電離層モデルを適用
- Iono-Free LC: 二重周波数 (GPS/GLONASS/ QZSS の場合は L1-L2、Galileo の場合は L1-L5) 測定による電離層フリーの線形結合が電離層補正に使用されます。
- Estimate STEC : 電離層パラメータ STEC (傾斜全電子量) の推定 *
- IONEX TEC:IONEX TECグリッドデータを使用
- QZSS Broadcast:QZSSが提供するブロードキャスト電離層モデルを適用
- QZSS LEX:(予約)
SingleモードとPPP-*モードでは利用不可です。
Troposphere Correction
対流圏パラメータ (ローバーと基地局の位置での天頂総遅延) を推定するかどうかを設定します。
- OFF : 対流圏補正を適用しない
- Saastamoinen: Saastamoinenモデルを適用
- SBAS: SBAS 対流圏モデル (MOPS) を適用
- Estimate ZTD: ZTD (zenith total delay) パラメータを EKF 状態として推定 *
- Estimate ZTD+Grad: ZTD と水平勾配パラメータを EKF 状態として推定 *
*はSingleモードでは利用不可です。
Satelite Ephemerics/Clock
衛星天体暦のタイプを設定します。
- Broadcaset : ブロードキャストエフェメリスを使用
- Precise : 正確なエフェメリスを使用 *
- Broadcast+SBAS: SBAS 長期高速補正付きブロードキャストエフェメリス
- Broadcast+SSR APC: RTCMによるブロードキャストエフェメリス
SSR補正(アンテナ位相センター値) - Broadcast+SSR CoM:ブロードキャストエフェメリス
RTCM
SSR補正(衛星重心値) - QZSS LEX:(予約)
Sat PCV
サテライトアンテナ PCV(位相中心変動)モデルを使用するかどうかを設定します。 この機能を使用するには、「ファイル」タブで「衛星アンテナ PCV ファイル」を設定します。
Singleモードでは利用不可です。
Rec PCV
受信機アンテナ PCV モデルを使用するかどうかを設定します。 この機能を使用するには、「ファイル」タブで「受信機アンテナ PCV ファイル」を設定します。
Singleモードでは利用不可です。
PhWindup
PPP モードの位相ワインドアップ補正を適用するかどうかを設定します。
PPP- モードでのみ利用可能です。
Reject Ecl
日食中の GPS Block IIA 衛星を除外するかどうかを設定します。 ブロック IIA 衛星の食は、ヨー姿勢の予期しない挙動により、しばしば PPP 解を劣化させます。
PPP- モードでのみ利用可能です。
RAIM FDE
RAIM (受信機自律完全性監視) FDE (障害検出と除外) 機能を有効にするかどうかを設定します。 RAIM FDE が有効になっている場合、残差の SSE (二乗誤差の合計) がしきい値を超えると、衛星は除外されます。 最小 SSE を示すために、除外された衛星が選択されます。
Excluded Satellites (+PRN: Included)
測位除外衛星を設定します。 スペースで区切られた衛星の PRN 番号を入力します。
GLONASS、Galileo、QZSS、BeiDou、SBAS の場合は、それぞれ Rnn、Enn、Jnn、Cnn、Snn を使用します (nn: 衛星のPRN またはスロット番号)。
衛星 ID の先頭に「+」を付けると、衛星が異常であっても測位対象に含まれます。
Navigation System
使用する航法衛星システムをチェックしてください。 チェックを外した衛星は測位に使用されません。
- GPS
- GLONASS
- Galileo
- QZSS
- SBAS
- BeiDou
Setting 2 オプション (p.38)
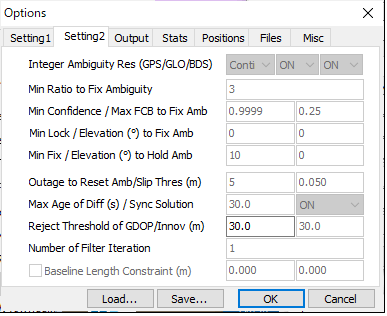
Integer Ambiguity Resolution (GPS)
GPS の整数アンビギュイティ解決の戦略を設定する
- OFF : あいまいさの解決なし
- Continuous : 連続的に静的な整数のあいまいさが推定され、解決されます *
- Instantaneous : 整数のあいまいさは、エポックごとに推定され、解決されます *
- Fix and Hold : 継続的に静的な整数のあいまいさを推定して解決します。 検証が OK の場合、あいまいさは解決された値に厳密に制限されます。 *
- PPP-AR : PPP におけるあいまいさの解決 (実験的) **
デフォルトはContinuous. Singleモードでは利用不可です。
* Kinematic、Static、Moving-baseline、Fixモードにのみ適用されます。
** PPP-* モードおよび RTKPOST にのみ適用可能
Integer Ambiguity Resolution (GLO)
GLONASS 整数のあいまいさ解決の戦略を設定します
- OFF: あいまいさを修正しません。
- ON: あいまいさを修正します。 通常、ローバーと基地局の同じタイプの受信機ペアのみのあいまいさを修正できます。 異なる受信機タイプには、DD ではキャンセルできない IFB (周波数間バイアス) があります。
- 自動キャリブレーション: 受信機のチャネル間バイアス項は、周波数による線形方程式として推定されます。
デフォルトはON
キネマティック、静的、移動ベースライン、および固定モードにのみ適用されます。
Min Ratio to Fix Ambiguity
最適な整数ベクトルと 2 番目に最適なベクトルの残差の二乗比を使用する「比率検定」の整数の曖昧性検証しきい値を設定します。
デフォルト:3.0
Min Confidence to Fix Amb.
PPP-AR モードでのあいまいさを修正するための最小信頼レベルの設定
Max FCB to Fix Amb.
PPP-AR モードでのあいまいさを修正するために、最大 FCB (フラクショナル サイクル バイアス) を設定します。
Min Lock / Elevation to Fix Ambiguity
最小ロック数と最小仰角 (度) を設定して、整数のあいまいさを修正します。 ロック数または仰角がこの値よりも小さい場合、あいまいさは固定整数ベクトルから除外されます。
デフォルト:0, 0
Min Fix / Elevation to Hold Ambiguity
Integer Ambiguity Resolution に「Fix and Hold」モードを選択した場合は、最小補正カウントと最小仰角 (度) を設定して曖昧性を保持します。
デフォルト:10, 0
Outage to Reset Ambiguity / Slip Thres
停止カウントを設定してあいまいさをリセットします。 データ停止回数がこの値を超えた場合、推定されたあいまいさは初期値にリセットされます。 また、エポック間のジオメトリフリー LC キャリア位相差のサイクル スリップしきい値 (m) を設定します。
デフォルト:5, 0.05
Max Age of Differential
ローバーと基地局の間の差分 (秒) の経過時間の最大値を設定します。
デフォルト:30
Sync Solution
ソリューションの時刻同期モードを設定します。
- OFF: 最小遅延モード。 解は、ローバー データの入力後すぐに出力されます。 遅延した基地局または補正データは、ローバー時間に外挿されます。
- ON: 整合解モード。 移動局データと基地局または補正データの両方が準備された後、ソリューションが出力されます。 解の時間はローバーの時間よりも遅れている場合があります。
この機能は、ver.2.4.2 では実装されていません。
RTKPOSTとSingleモードでは利用できません。
デフォルト:OFF
Reject Threshold of GDOP / Innov.
GDOP とイノベーションのリジェクトしきい値 (適合前残差) を設定します (m)。 GDOP またはイノベーションが値を超えている場合、オブザーバブルは推定プロセスから外れ値として除外されます。
デフォルト:30, 30
Number of Iteration
推定フィルターの計測更新における反復回数を設定します。 基線長が 1 m のように非常に短い場合、測定方程式の非線形性を処理するために反復が有効な場合があります。
デフォルト:1
Baseline Length Constant
移動ベースモードの場合、基線の長さの制約を確認して設定します。 長さを m 単位で入力し、拘束の標準偏差 (m) を入力します。
Output オプション (p.40)
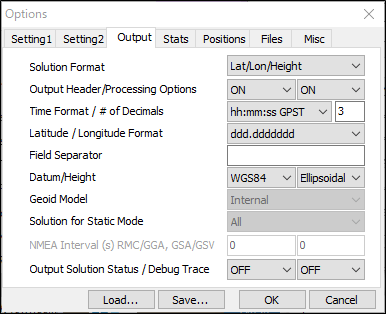
Solution Format
出力ソリューション形式を設定します。
- Lat/Lon/Height : 緯度、経度、高さ
- X/Y/Z‐ECEF : ECEF座標のX/Y/Z成分
- E/N/U-Baseline: ベースラインベクトルのE/N/U成分
- NMEA0183 : NMEA GPRMC、GPGGA、GPGSA、GLGSA、GAGSA、GPGSV、GLGSV、GAGSV
Output Header
ヘッダーを出力するかどうかを設定します。
NMEAには適用不可
Output Processing Options
処理オプションを出力するかどうかを設定します。
NMEAには適用不可
Time Format
時刻の形式を設定する
- ssssssss.sss GPST : GPSの週と時刻
- hh:mm:ss GPST : yyyy/mm/dd hh:mm:ss GPST
- hh:mm:ss UTC : yyyy/mm/dd hh:mm:ss UTC
- hh:mm:ss JST : yyyy/mm/dd hh:mm:ss JST
NMEAには適用不可
# of Decimals
時刻形式の小数点以下の桁数を設定する。
NMEAには適用不可
Latitude / Longitude Format
ソリューション形式が Lat/Lon/Height に設定されている場合は、緯度と経度の形式を設定します。
- ddd.dddddddd : 度数
- ddd mm ss.sss : 度分秒
NMEAには適用不可
Field Separator
フィールドの区切りを設定します。
NMEAには適用不可
Datum
ソリューション フォーマット オプションが Lat/Lon/Height に設定されている場合は、測地基準系を設定します。
- WGS84 : WGS84 データム
- Tokyo : Tokyoデータム
(現在のバージョンは WGS84 のみをサポートしています)
Height
高さの種類を設定します。
- Ellipsoidal : 楕円体の高さ
- Geodetic : 測地高度
Geoid Model
Height オプションが Geodetic に設定されている場合は、ジオイドモデルを設定します。
- 内部:内部ジオイドモデル
- EGM96‐BE (15′) : EGM96 (15′ x 15′ グリッド)
- EGM2008‐SE (2.5′) : EGM2008 (2.5×2.5’グリッド)
- EGM2008‐SE (1′): EGM2008 (1×1’グリッド)
- GSI2000 (1×1.5’): GSI2000 (1×1.5’ グリッド)
外部ジオイド モデルを使用している場合は、「ファイル」タブでジオイド ファイル パスを指定します。
Solution for Static Mode
Static または PPP-Static モードのソリューション タイプを設定します
- All: 処理期間のすべてのソリューションが出力されます
- Single: 処理期間中の解を 1 つだけ出力します。 解決の時間は、処理期間の最初のエポックです。
NMEA Interval (s) RMC / GGA
NMEA GPRMC、GPGGAメッセージの出力間隔を設定
RTKNAVIのみ
NMEA Interval (s) GSA / GSV
NMEA GPGSA、GLGSA、GAGSA、GPGSV、GLGSV、GAGSVメッセージの出力間隔を設定
RTKNAMIのみ
Output Solution Status
ソリューション ステータス ファイルの出力レベルを設定します。 解ステータス ファイルには、推定された状態と残差が含まれています。 ソリューション ステータス ファイルは、現在のディレクトリ (RTKNAVI) または出力ファイル ディレクトリ (RTKPOST) に作成されます。
Output Debug Trace
デバッグトレースファイルの出力レベルを設定します。 OFF に設定すると、デバッグトレースファイルは出力されません。 デバッグ トレース ファイルは、現在のディレクトリ (RTKNAVI) または出力ファイル ディレクトリ (RTKPOST) に作成されます。
Statistics オプション (p.42)
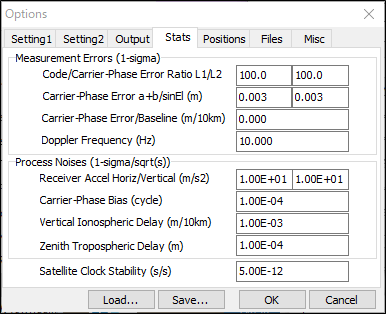
Code / Carrier-Phase Error Rate L1/L2
L1 および L2/L5/L6 の搬送波位相誤差に対する疑似距離誤差の標準偏差の比率を設定します。
デフォルト:100, 100
Carrier-Phase Error
キャリア位相誤差標準偏差(m)の基準項を設定します。
デフォルト:0.003
Carrier-Phase Error / sinEl
キャリア位相誤差標準偏差の仰角依存項を設定 (m/sin(el))
デフォルト:0.003
Carrier-Phase Error / Baseline
キャリア位相エラー標準偏差のベースライン長依存項を設定します (m/10km)
デフォルト:0
Doppler Frequency
ドップラー誤差の標準偏差の設定 (Hz)
(現在のバージョンは値を使用しません)
デフォルト:1
Receiver Accel Horiz / Vertical
受信機加速度のプロセス ノイズ標準偏差を水平成分または垂直成分として設定します。 (m/s2/sqrt(s))。 レシーバーダイナミクスがオフに設定されている場合、それらは使用されません。
デフォルト:1と0.1
Carrier-Phase Bias
キャリア位相のプロセス ノイズ標準偏差を設定します。
バイアス (あいまいさ) (サイクル/sqrt(s))
デフォルト:1E-4
Vertical Ionospheric Delay
10 km ベースラインあたりの垂直電離圏遅延のプロセス ノイズ標準偏差を設定します (m/sqrt(s))
デフォルト:1E-3
Zenith Tropospheric Delay
天頂対流圏遅延のプロセス ノイズ標準偏差 (m/sqrt(s)) を設定します。
デフォルト:1E-4
Satellite Clock Stability
衛星クロックの安定度 (s/s) を設定します。 この値は、基地局観測量の内挿に使用されます。
デフォルト:5E-12
Positions オプション (p.43)
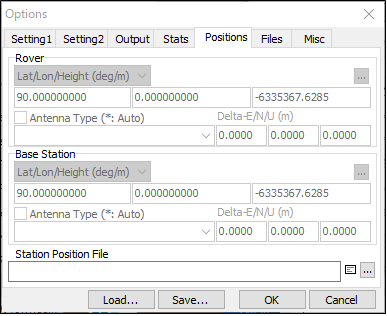
Lat/Lon/ Height (deg/m) (Rover)
ローバー アンテナが固定されている場合は、ローバー アンテナの位置を設定します。 Base Station についても同じフィールドを参照してください。
Antenna Type (Rover)
ローバーアンテナのタイプを選択します。
アンテナ タイプを選択するには、Files で Receiver Antenna PCV ファイル パスを設定します。 「*」を使用すると、RINEX OBS ヘッダーのアンテナ情報によって、アンテナ タイプとアンテナ デルタが認識されます。
Delta-E/N/U (Rover)
ローバー アンテナのデルタ位置を、マーカー (m) を参照して ARP (アンテナ基準点) 位置の E/N/U オフセットとして設定します。
Lat/Lon/ Height (deg/m) (Base Station)
基地局アンテナの位置を設定します。
- Lat/Lon/Height (deg/m): 緯度/経度/高さを度とmで表したもの
- Lat/Lon/Height (dms/m): 緯度/経度/高さを度/分/秒および m で表したもの
- X/Y/Z-ECEF (m): ECEF フレームの X/Y/Z 成分。
- Average of Single-Pos: 単一点解の平均を使用
- ポジションファイルから取得:ポジションファイルのポジションを使用します。 ローバ観測データファイルパスの先頭4文字のIDを用いてステーションを検索する。
- RINEX ヘッダー位置: RINEX OBS ヘッダーのおおよその位置を使用します。
高さは楕円体の高さとして指定されます
Antenna Type (Base Station)
基地局アンテナのタイプを選択します。
アンテナ タイプを選択するには、Files で Receiver Antenna PCV File を設定します。 「*」を使用すると、RINEX OBS ヘッダーのアンテナ情報によって、アンテナ タイプとアンテナ デルタが認識されます。
Delta-E/N/U (Base Station)
基地局アンテナのデルタ位置をマーカ(m)を基準にARP位置のE/N/Uオフセットとして設定します。
Station Position File (Base Station)
ステーションリストから位置を取得するステーション位置ファイルパスを入力します。 ステーション位置ファイルは、複数の行を含むテキスト ファイルです。 各行は、ステーションのレコードを表します。 レコードには次の情報がスペースで区切って含まれます。
- 緯度 (度)
- 経度 (度)
- 楕円体の高さ (m)
- ステーション ID
- ステーション名
「%」で始まる行はコメント行として扱われます。 ステーション位置ファイルの例は、rtklib_<ver>\data\stations.pos にあります。
SINEX ステーションの位置も使用できます。 サンプルの SINEX ファイルは次の場所にあります。
rtklib_<ver>\data\igs10P1565_wocov.snx
[Files] タブで Station Position File を設定すると、[…] ボタンを押して [Stations] ダイアログのステーション リストからローバーの位置または基地局アンテナを選択できます。 Lat/Lon/Hgt 形式または SINEX 形式のファイルを読み込むことができます。 ファイルの種類は自動的に認識されます。 検索フィールドに単語を指定して検索ボタンを使用すると、ステーション ID または名前を検索できます。
Files オプション (p.45)
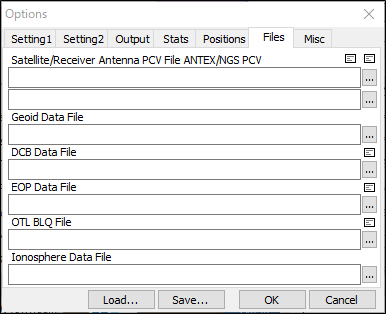
Satellite Antenna PCV File ANTEX
正確な天体暦または SSR 補正を使用する場合は、衛星アンテナ PCV (位相中心変動) 補正用の ANTEX アンテナ パラメーター ファイル パスを入力します。 通常、IGS が提供する最新の igs08.atx ファイルを使用します。
ANTEX ファイルの例は、次の場所にあります。
rtklib_<ver>\data\igs08.atx.
Receiver Antenna PCV File ANTEX or NGS PCV
受信アンテナの位相中心オフセットと PCV 補正を適用する場合は、ANTEX または NGS タイプのアンテナ パラメーター ファイル パスを入力します。
アンテナ パラメータ ファイルの例は、次の場所にあります。
rtklib_<ver>\data\igs08.atx.
また
rtklib_<ver>\data\ngs_abs.pcv.
Geoid Data File
ジオイド モデルとして外部モデルを選択する場合は、ジオイド データ ファイルのファイル パスを入力します。
DCB Data File
PPP 用 DCB 補正のファイルパスを CODE 形式で入力します。
アンテナ パラメータ ファイルの例は、次の場所にあります。
rtklib_<ver>\data\P1C1_ALL.DCB
rtklib_<ver>\data\P2C2.DCB
rtklib_<ver>\data\P1P2_ALL.DCB
EOP Data File
EOP データ ファイルのファイル パスを入力します。 EOP データ ファイルの形式は、IGS ERP 形式バージョン 2 でなければなりません。
OTL BLQ File
OTL 係数ファイルのファイル パスを入力します。 OTL 係数ファイルの形式は BLQ 形式です.
Ionosphere Data File
電離層データファイルパスを入力します。
Misk オプション (p.48)
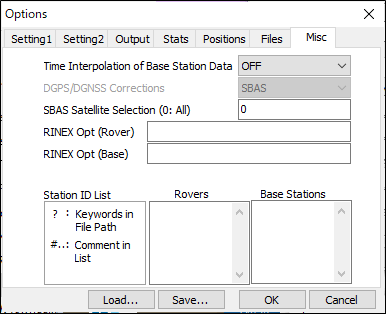
Time Interpolation of Base Station Observation Data
ON を選択すると、基地局データの時間補間が有効になります。 ON を選択すると、基地局データはローバー エポックに線形補間され、DD (double difference) が作成されます。 チェックされていない場合、基地局データの最も近いエポックが DD に使用されます。
SBAS Satellite Selection
SBAS DGPS 補正が有効になっている場合は、使用する SBAS 衛星 PRN 番号を入力します。 0 を入力すると、使用可能なすべての SBAS 衛星が使用されます。
RINEX Opt (Rover)
ローバー RINEX 観測データの RINEX 読み取りオプションを次のように指定します。 複数のオプションをスペースで区切って入力できます。
- Gss[=+n.nn]: GPS 信号 ss を選択
- Lss[=+n.nn]: GLO 信号 ss を選択
- ELss[=+n.nn]: GAL 信号 ss を選択
- JLss[=+n.nn]: QZS信号ssを選択
- CLss[=+n.nn]: BDS 信号 ss を選択
- SLss[=+n.nn]: SBS 信号 ss を選択
ss : シグナル ID (付録 D.3 を参照)
=+n.nn: キャリア位相オブザーバブルに追加される位相シフト +n.nn (サイクル)
オプションなしで複数の信号を
周波数、RTKLIB は、信号のデフォルトの優先順位に従って、周波数の信号を選択します。 付録 D.4 複数のシグナルのデフォルト優先度を参照してください。
RINEX Opt (Base)
RINEX Opt (Rover) と同様に、基地局 RINEX 観測データの RINEX 読み取りオプションを指定します。
Station ID List
複数の入力ファイルまたは複数のセッションを使用するバッチ処理の場合、次のキーワードを含む入力ファイル パスまたは出力ファイル パスを設定できます。
%Y、%y、%m、%d、%n、%W、%D、%h、%H、%r、%b
キーワードは適切な値に置き換えられるか、複数のセッション分析用に拡張されます。
時間キーワードを有効にするには、メイン ウィンドウで開始時間、終了時間、および単位 (オプション) を設定します。 キーワード %r、%b については、次項のRoversやBase Stationsを設定してください。
オンライン参照については、「?」ボタンを押してください。
Rovers
ローバー ID リストを入力して、入力および出力ファイル パスのキーワード %r を置き換えます。 「#」で始まる行はコメントとして扱われます。
Base Stations
基地局 ID リストを入力して、入力および出力ファイル パスのキーワード %b を置き換えます。 「#」で始まる行はコメントとして扱われます。
Have fun!
コメント